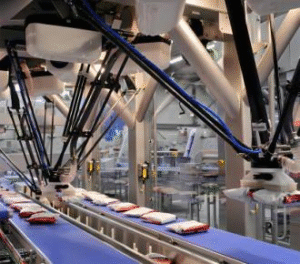
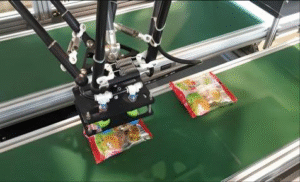
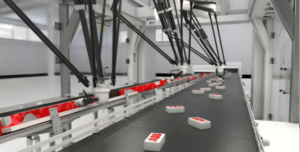
Parallel Robot Product Features:
1.Visual positioning perception. Integrating cameras, sensors, and other devices, taking photos and analyzing them through a visual system, extracting the position and feature information of the workpiece, and transmitting it to the robot.
2.Parallel grabbing and sorting. Screen workpieces based on visual data, and use parallel robots to quickly and accurately grab and complete sorting.
3.Matrix placement and organization. According to the preset matrix rules, the sorted workpieces are placed in designated positions to achieve orderly arrangement.